La motorisation des volets
Les OC2 étaient munis de volets d'aération du compartiment moteur situés à l'avant de l'autorail. Ces volets changeaient de position suivant le sens de circulation. Une personne bienveillante m'a mis au défi, sur le forum du GEMME, de rendre ces volets fonctionnels...
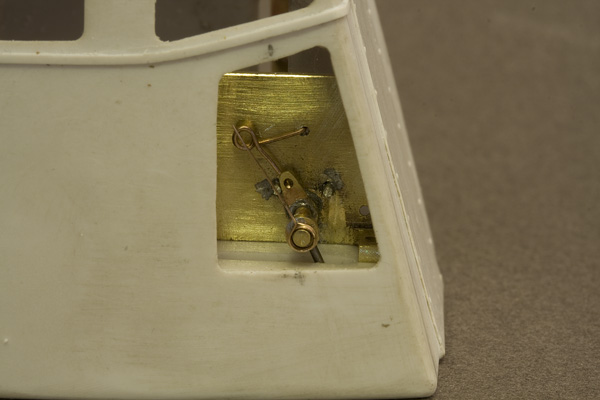
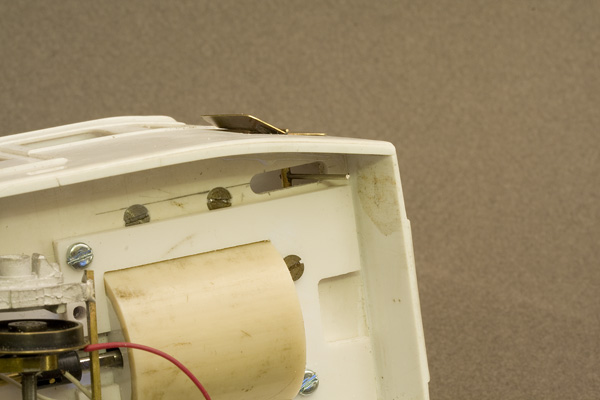
Les volets en laiton ont une forme de V très évasé. Ils sont mobiles grâce à un axe en laiton soudé dans l'angle du V qui vient se loger dans deux rainures taillés dans la caisse. Un axe traversant la largeur de l'autorail porte aux deux extrémités des fils ressort en bronze qui viennent appuyer sur des doigts soudés à l'arrière des volets. Une rotation de cet axe permet donc d'agir simultanément sur les deux volets, se mettant alors en position avant ou arrière. Le mécanisme est fixé à l'intérieur de la cabine et est quasiment invisible depuis les fenêtres.


Dans un premier temps, la rotation de l'axe s'effectuait par l'intermédiaire d'un doigt en laiton situé sous le châssis, caché par les jupes.
Mais il est finalement paru intéressant de pousser le défi à son maximum en motorisant le système de telle sorte que la modification de la position des volets puisse être obtenue simplement par l'intermédiaire de la commande digitale. La conception du système fut bien moins simple...
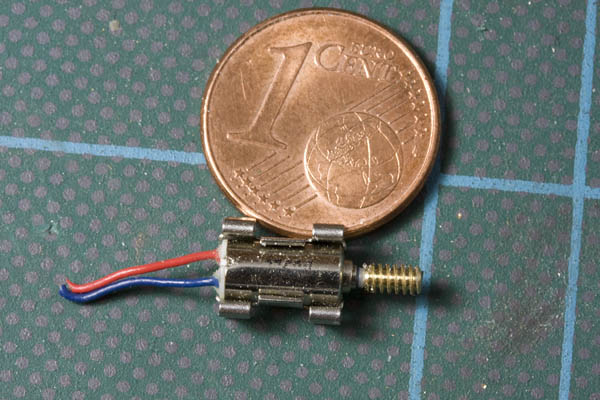
Après avoir envisagé sans succès pas mal de système à base d'électro-aimant, de fil à mémoire, de servomoteur, etc. la solution est apparue en tombant dans mes réserves sur un micromoteur de pager (1) récupéré depuis longtemps sur un téléphone portable hors d'usage. Avec un diamètre de quatre millimètres, cela devait permettre de servir de base à un mécanisme compact.
(1) Moteur qui munis dun contrepoids sur larbre servent de vibreur lorsque le téléphone est en mode silence. On peut les récupérer sur des téléphones hors dusage, mais on en trouve également sur internet pour un prix modique dun ou deux dollars !
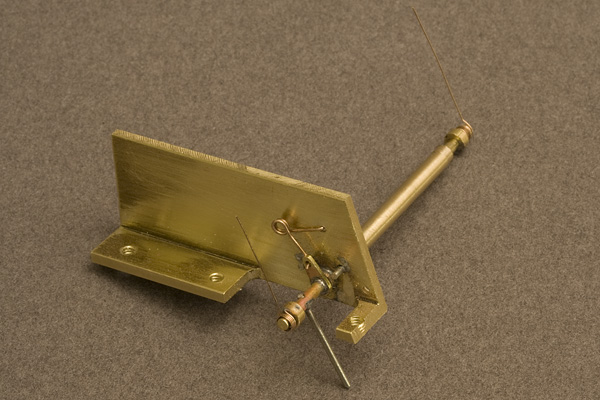
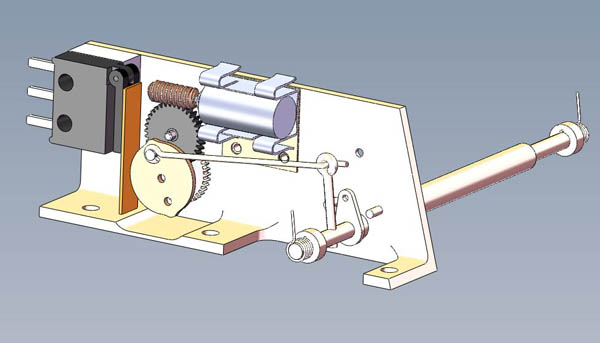
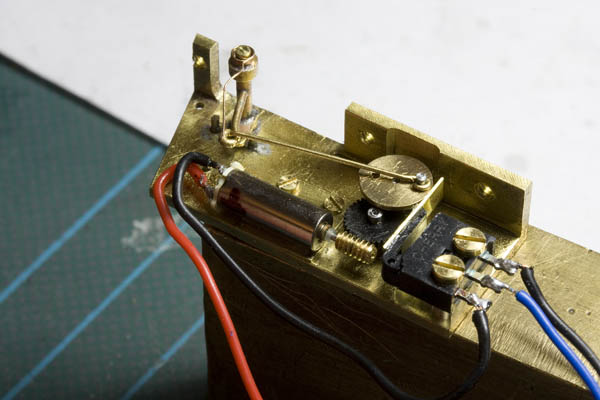
La contrainte de la commande depuis un décodeur digital imposait un principe de commande par tout ou rien et interdisait une commande par inversion du sens de rotation du moteur, sauf à prévoir une électronique de commande complexe. Un mécanisme à came répond à ce cahier des charges. La came tourne dun demi-tour pour se positionner dans une position puis un autre demi-tour la ramène en position initiale, avec détection de chaque demi-tour pour arrêt du moteur par un rupteur sur le bord de la came. Le système peut être simplement commandé par impulsion. Le rupteur miniature a simplement été récupéré dans un lecteur de disquettes informatiques obsolète.
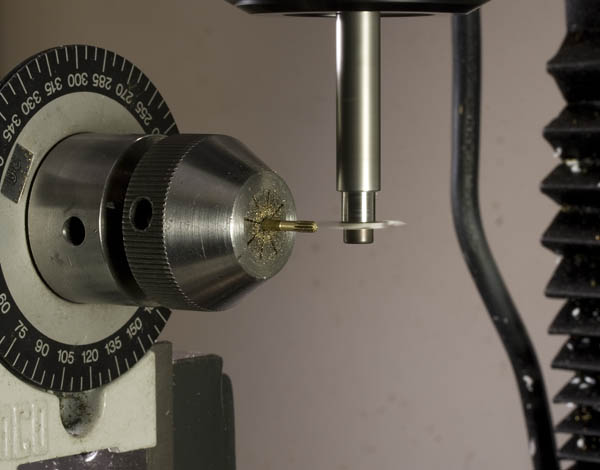
Il n'a pas été possible de trouver dans mes réserves d'engrenage correspondant aux besoins. Il a donc fallu les réaliser. Le module de 0,159, qui peut paraître a priori étrange, a été déterminé par la fabrication de la vis sans fin : Un pas de 0,5 mm est facile à obtenir sur mon tour, or 0,5/Pi = 0,159... De plus possédant un plateau diviseur de 36 trous, cela faisait déjà une réduction de 1/36 pour le premier étage de réduction à vis sans fin, tout ça pour une roue de 6,05 mm de diamètre. Ces petits moteurs tournant vite, un second étage de réduction constitué par un pignon de 10 dents attaquant une seconde roue de 36 dents permet une réduction totale de 1/130 dans un encombrement inférieur à 13 x 6,1 mm.
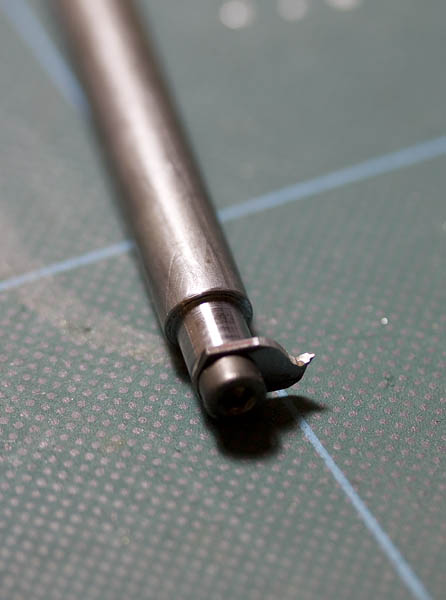
La fabrication de la vis sans fin n'a pas posé de difficulté autre que du fait de ses faibles dimensions un bon supportage avec une pointe tournante a été indispensable pour ne pas avoir une vis sans fin... conique !

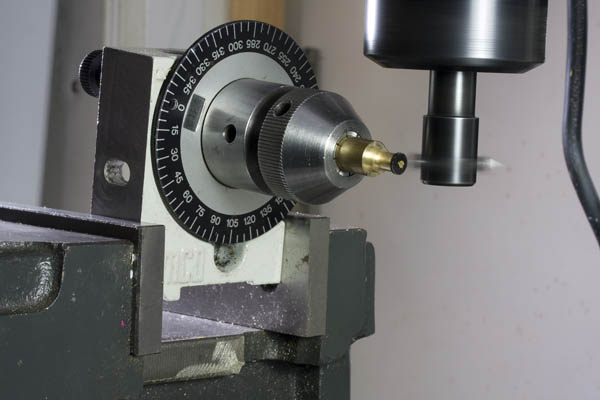
Les engrenages ont été faits à la fraiseuse. Ne possédant bien évidemmant pas de fraise module au module de 0,159, une fraise couteau a été utilisée. Celle-ci a été taillée "à l'il" sous la loupe dans une veille lame de scie sauteuse avec une fraise diamanté. Je ne garantis pas que les dents respectent exactement le profil d'une développante de cercle... mais ça marche.

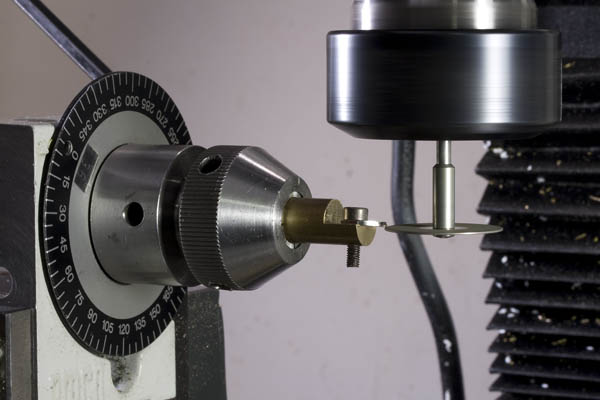
L'axe du diviseur doit être incliné par rapport à la fraise dans le cas de la roue menée par la vis sans fin, du fait de l'inclinaison du pas de la vis sans fin.
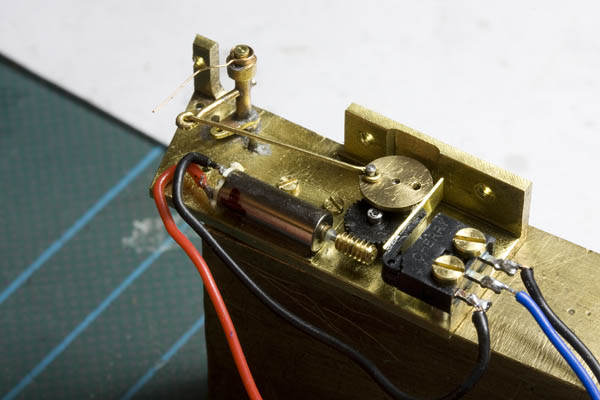
L'ensemble est monté sur la platine. Le frottement du doigt palpeur en plastique du rupteur sur la came en laiton était trop important, entrainant des coincements aléatoires. Comme le déplacement correspondant au déclanchement fiable du rupteur (8/100 de mm) était de toute façon nettement plus important que celui prévu sur la came (30/100 mm), le problème a été résolu en prolongeant le bras du palpeur par un morceau de laiton. Ainsi modifié, le fonctionnement est devenu totalement fiable et une impulsion permet de faire tourner sans problème la came de 180°.
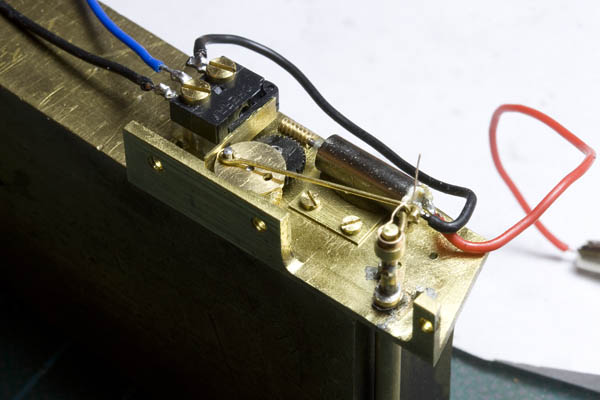

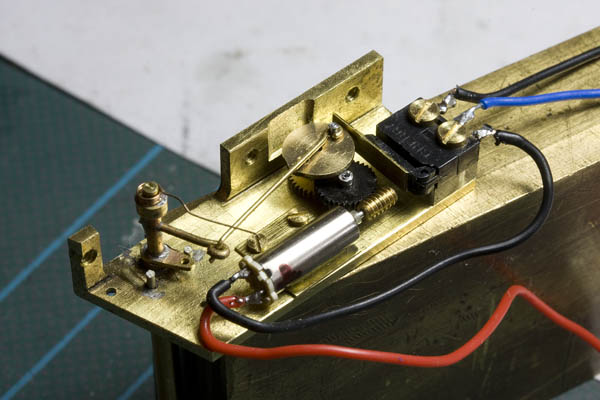
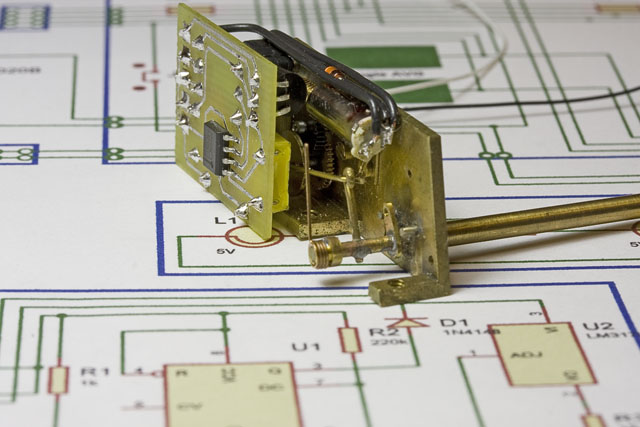
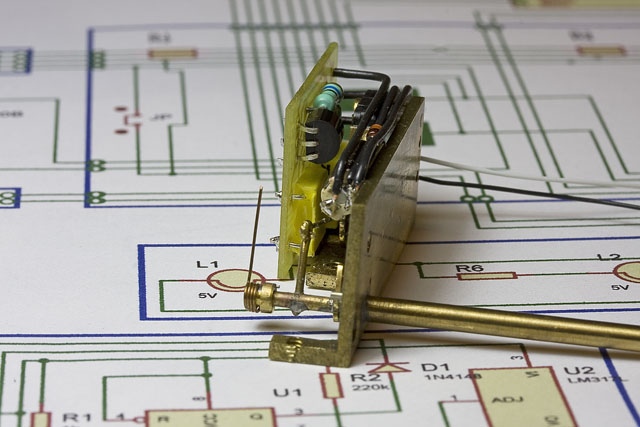
Le mécanisme en position arrière, puis avant.
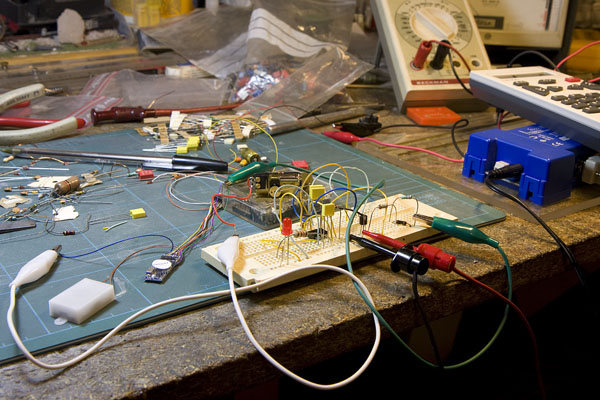
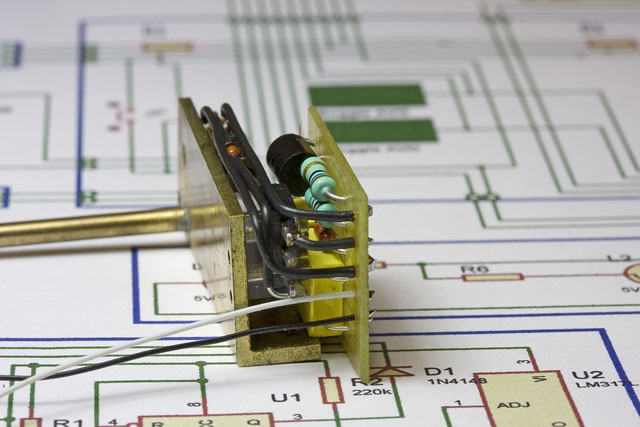
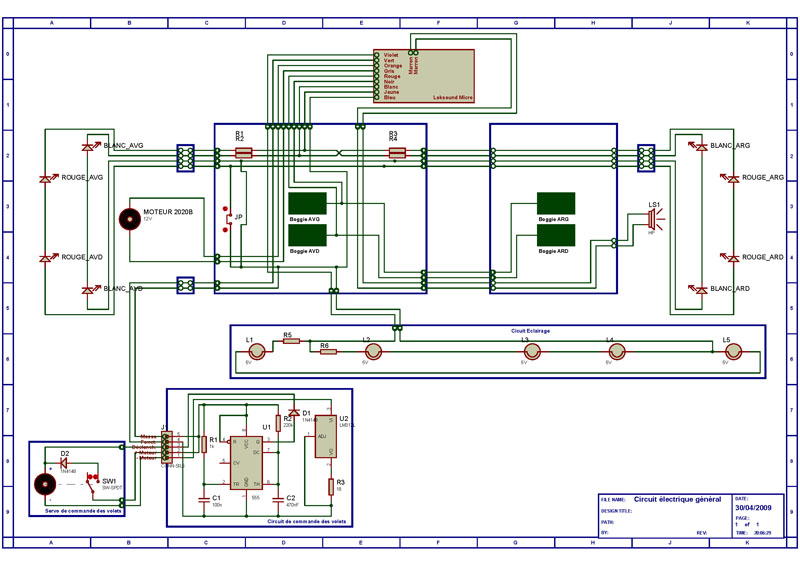
Un circuit électronique permet d'alimenter le moteur sous une tension de 1,5 V à partir des impulsions de durée variables (puisque commandées par l'utilisateur) envoyées par le décodeur. Des tests du schéma ont d'abord été effectués, avant de réaliser un circuit imprimé pour regrouper l'ensemble des composants.
Dans l'impossibilité de trouver un LM317 en version CMS chez mes fournisseurs habituels, le circuit n'est pas aussi compact qu'il aurait pu l'être. Néanmoins, grâce à la position peu orthodoxe de certains composants, ce module de commande a pu prendre place directement le long du mécanisme et rester peu visible de l'extérieur.
Le câblage électrique
La digitalisation a la réputation de simplifier le câblage électrique ; J'ai parfois des doutes...
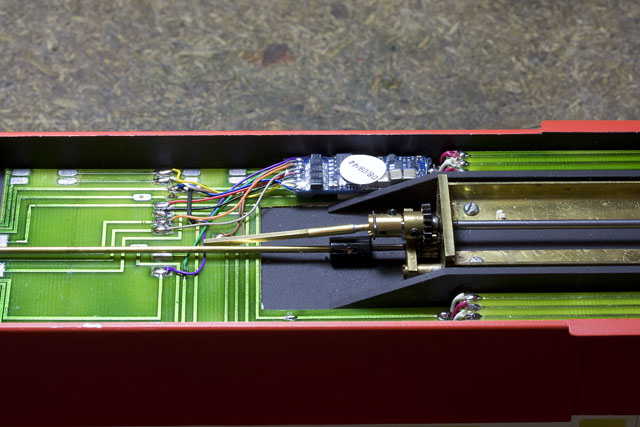
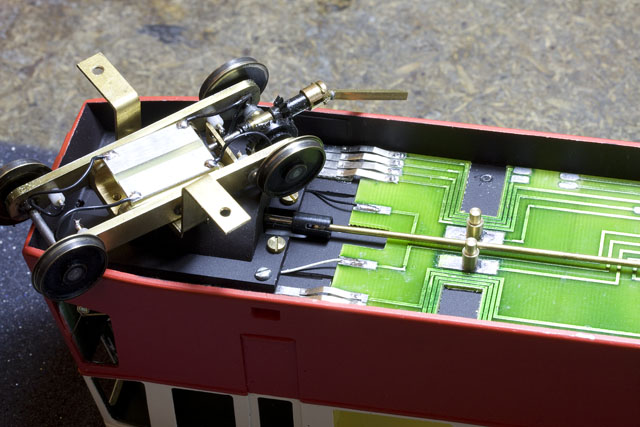
Certains intérieurs de modèles réduits ressemblent fortement à des plats de spaghetti. Outre que cela n'est très esthétique, la maintenance n'est généralement pas très facile à faire. Aussi, pour rationaliser et simplifier le câblage a été réalisé sous la forme de modules en circuit imprimées, pour la plupart collés sous le châssis.
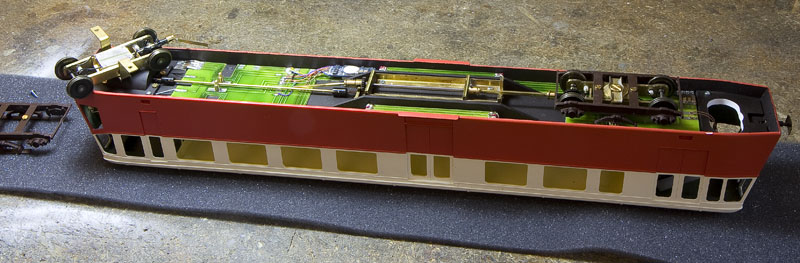
Le décodeur Loksound est lui-même collé au scotch double face en mousse sur le circuit imprimé.
Pour rendre la maintenance encore plus facile, les modules ne sont pas reliés par des fils soudés, mais par des palpeurs. Ainsi les liaisons électriques entre le châssis et la caisse sont réalisées par des lamelles en chrysocale nickelées pour améliorer les contacts. De même, la liaison électrique entre les bogies et le châssis est réalisé par des palpeurs en laiton appliqués sur un morceau de circuit imprimé collé sur la traverse mobile du bogie. La prise de courant depuis les roues est également réalisée par des palpeurs en bronze montés dans un support en delrin.
Le haut-parleur n'a pu trouver place dans le compartiment moteur et a dû être repoussé dans le compartiment arrière.

